

About me
My current main research interest is in combinations of control and communication. I also have a broad interest ranging from pure mathematics to industrial applications of control. I have a PhD in control (Lund 1992) and have been a professor in Automatic Control since 1999. During the years 2001-2010 I worked at Ericsson with mobile phone systems. From 2010 I am working full time as (ELLIIT) professor in Automatic Control at Lund University.
Research
I am part of
- ELLIIT, a network organization for Information and Communication Technology (ICT) research at Linköping, Lund, Halmstad and Blekinge
- LCCC, the Lund center for Control of Complex Engineering Systems
The following is a list of main present and past research
Collaboration with the European Spallation Source
Researchers: Bo Bernhardsson, Anders J Johansson (Dept. of Electrical and Information Technology), Rolf Johansson, Olof Troeng
Funding: European Spallation Source
 The European Spallation Source will be a major user facility at which researchers from academia and industry will investigate scientific questions using neutron beams.
The European Spallation Source will be a major user facility at which researchers from academia and industry will investigate scientific questions using neutron beams.
Neutron methods provide insights about the molecular building blocks of matter not available by other means. Applications include research in life science, soft condensed matter physics, chemistry of materials, fundamental particle physics and engineering materials. More info here.
RF Field Control
The neutrons are produced by colliding high-speed protons with a rotating tungsten target. The protons are accelerated by oscillating electro-magnetic fields in more than 150 radio-frequency cavities along the 482 meter long linear accelerator. In order to avoid defocusing of the beam (which leads to activation of the accelerator structure), it is important that the amplitude and phase of the field in every cavity are kept very close to their nominal values. In order to achieve this individual feedback loops with sampling frequencies of 10 MHz will be used to regulate the fields.

The layout of the ESS linear accelerator
The Department of Automatic Control is involved in modeling and controller design for the RF system through this group at the Department of Electrical and Information Technology.
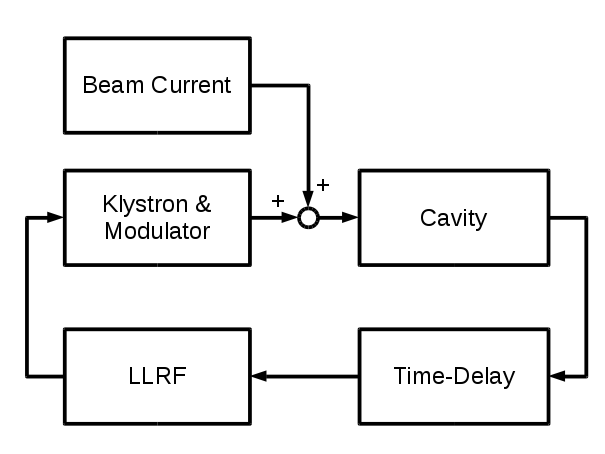
Schematic description of the control problem for a single cavity
Joint Positioning and Radio Channel Estimation
with Anders Mannesson (AC), Fredrik Tufvesson (EIT), Atif Yaqoob (EIT)
The idea is to combine information from gyros, accelerometers and compass sensors with radio channel estimation and to determine the fundamental properties of such schemes. The hope is to enable two technology advancements:
- a new method for significantly reduced drift in low cost navigation systems
- improved radio channel estimation for moving terminals
Initial research show promising result as presented in the licentiate thesis by Anders Mannesson and in this presentation
The work is based on angle of arrival estimation using antenna arrays which is a well studied problem with many different algorithms resolving the individual rays impinging on the array. However, less attention has been given to so called virtual array antennas where only one receiver element is used. By tracking the movement of the element, an array with properties similar to a stationary array with multiple elements is formed. By combining the IMU and the radio channel information, a map of the local radio environment can be obtained, such as in this picture illustrating the complex valued radio channel for three impinging planar radiowaves in a noise-free situation

Tightly coupled nonlinear state estimation algorithms between IMU signals and radio channel estimates are used to simultaneously estimate this map and obtain improved pose estimates.
The major challenge is to battle the drift in sensors and radio crystal oscillators. We work with both real-world measurements and simulations to evaluate performance. Initial experiments show promising results. The following figure shows performance (simulations left, real experiments right) with realistic radio and IMU imperfections. There is a dramatic improvement by including radio channel information compared to using dead reckoning, especially for movements longer than 10 seconds.


Our future research now focuses on improving radio channel estimation and prediction by adding IMU information and using motion models.
Marine Vibrator Control
The goal is to model and control large loudspeakers, so called marine vibrators, that are used to generate acoustic underwater signals.
Performance requirements on out-of-band spectrum of the acoustic signal are achieved by careful characterisation of the dynamical behavior of the vibrators and use of frequenyc domain Iterative Learning Control (ILC). This has been found to successfully reduce the impact of nonlinearities such as friction and backlash. A 40 dB suppression of out-of-band harmonics has been acheived in experiments (in air).
The project is funded by the Norwegian company PGS.

Control with Communication Constraints
with Erik Johannesson, Ather Gattami, Anders Rantzer, Andrey Gulchak
Classical control theory assumes perfect communication, without limitations, between different parts of the control system and the process. The trend towards large-scale distributed systems makes it interesting to study the interplay between communication and control such as fundamental limitations of control performance arising from communication constraints.
In Erik Johanesson's PhD thesis several such situations are studied. We model the communication constraints as an signal to noise ratio (SNR) constraint for the communication channel. Such constraints give an incentive to perform coding and decoding of the transmitted signal in addition to the usual filtering and computation of control signals.
The problem of designing the controller, coder and decoder simultaneously is found to be solvable by convex optimization and spectral factorization giving efficient methods for their calculation.
The situation in the following figure with an SNR constraint on the channel is studied in
- E. Johannesson, A. Rantzer, B. Bernhardsson and A. Ghulchak, "Encoder and Decoder Design for Signal Estimation," in Proc. American Control Conference, Baltimore, USA, June 2010.
- E. Johannesson, A. Ghulchak, A. Rantzer and B. Bernhardsson, "MIMO Encoder and Decoder Design for Signal Estimation," in Proc. 19th Inter- national Symposium on Mathematical Theory of Networks and Systems, Budapest, Hungary, July 2010.
- E. Johannesson, "Signal Estimation over Channels with SNR Constraints and Feedback," in Proc. 18th IFAC World Congress, Milano, Italy, August 2011.
 The main result is that if encoders and decoders are restricted to linear filters the optimal ones can be found by solving an extension of the Wiener filter equations
The main result is that if encoders and decoders are restricted to linear filters the optimal ones can be found by solving an extension of the Wiener filter equations
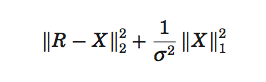
where R is in L_infinity and X in H_2. The first term is the same as in the classical Wiener filter design and the new last term, where sigma is the SNR constraint on the channel, describes the added cost of imperfect communciation.
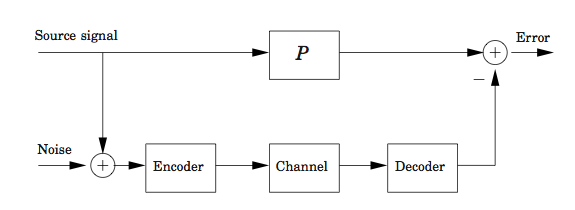
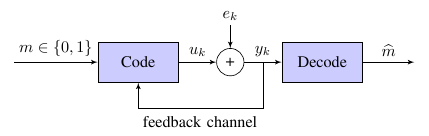
Problems concerning feedback design is also studied as described in the following figure. Here the communication channel is modeled as having an SNR constraint with the added possibility of using also a perfect communication feedback channel (through the filter B). The joint design of coder C, decoder D, and feedback filter B is solved through convex optimization.

- E. Johannesson, A. Rantzer and B. Bernhardsson, "Optimal linear control for channels with signal-to-noise ratio constraints," in Proc. American Control Conference, San Francisco, CA, USA., June 2011.
- E. Johannesson, A. Rantzer and B. Bernhardsson, "A Framework for Lin- ear Control over Channels with Signal-to-Noise Ratio Constraints," 9th IEEE International Conference on Control & Automation, Santiago, Chile, December 2011.
Another line of research focuses on the impact of feedback for communication under a delay constraint. In
- B. Bernhardsson, "Using a Gaussian Channel Twice", IEEE International Symposium on Information Theory, Istanbul, 2013
I study the energy needed to transmit one bit of information over a Gaussian channel achieving a certain bit error rate. The setup in the following figure is used, with a constraint on the average expected energy of the sequence u=(u_1,...,u_N).
In the paper only the case N=2 is treated but similar techniques can be used to derive the result in the following figure for any N using dynamic programming (the needed work grows linearly with N).

The red curve for N=infinity is the well known Shannon limit.
Real-time Control Systems with Delays
with Johan Nilsson and Björn Wittenmark
Event-based Control
with Karl Johan Åström, Toivo Henningsson and Anton Cervin
Iterative Learning Control
with Olof Sörnmo, Mahdi Ghezai and Bo Lincoln
Dynamical Analysis of Harmonics in Electrical Systems
with Erik Möllerstedt and Henrik Sandberg
Control of Liquid Slosh
with Mattias Grundelius
Singular Values of Trilinear Forms
with Jaak Peetre
Control of Hybrid Systems
with Jörgen Malmborg
The Real Stability Radius and Real Perturbation Values
with Anders Rantzer and Qiu Li
An Extension of Bohr's Inequality
with Lars Hörmander
Bohr's inequality states that if u(t) is a high-frequency signal in the sensethat u has no spectrum in [-R,R] and if du/dt is bounded then u is continuous and bounded by: R sup |u| <= pi/2 sup |du/dt|. In the paper
An Extension of Bohr's Inequality
we prove that when the spectrum of u is outside the disc |z| < R then a similar bound is valid for the Cauchy-Riemann operator
R sup |u| <= C sup |du/dx + idu/dy|
and we calculate the optimal constant C=2.903887282.. and the extremal u for this bound.
PhD-thesis: Topics in Digital and Robust Control of Linear Systems
Modeling and Analysis of Flow-Through Dialyzers
with Eduardo Martins and Gillis Johansson
PhD Students
Currently I am supervisor or co-supervisor* for
- Christian Rosdahl
- Kaito Auro*
- Martin Morin*
- Marcus Greiff*
- Victor Millnert*
- Jacob Bergstedt (prev. Antonsson)
- Olof Troeng
- Mattias Fält*
- Gabriel Turesson (former Ingesson)*
- Carolina Lidström*
- Marcus Thelander-Andren*
List of previous students (with me as supervisor or cosupervisor*)
- Anders Mannesson, Joint Positioning and Multipath Radio Channel Estimation and Prediction, 2016
- Jonas Dürango, Control Services for improving Cloud Service Robustness, (Lic), 2016
- Meike Stemmann*, Glycemic Control and Temperature Control in Buildings, 2016
- Fredrik Magnusson*, Numerical and Symbolic Methods for Dynamic Optimization, 2016
- Atif Yaqoob* (EIT), Inertial Measurement Unit based Virtual Antenna Arrays - DoA Estimation and Positioning in Wireless Networks, (Lic), 2016
- Jerker Nordh, Bayesian Inference for Nonlinear Dynamical Systems, 2015
- Toivo Henningsson*, Stochastic Event-Based Control and Estimation, 2012
- Maria Henningsson*, Data-Rich Multivariable Control of Heavy-Duty Engines, 2012
- Erik Johannesson*, Control and Communication with Signal-to-Noise Ratio Constraints, 2011
- Ather Gattami*, Optimal Decision with Limited Information, 2007
- Henrik Sandberg*, Model Reduction for Linear Time-Varying Systems, 2004
- Bo Lincoln*, Dynamic Programming and Time-Varying Delay Systems, 2003
- Mattias Grundelius, Methods for Control of Liquid Slosh, 2001
- Erik Möllerstedt, Dynamic Analysis of Harmonics in Electrical Systems, 2000
- Jörgen Malmborg, Analysis and Design of Hybrid Control Systems, 1998
- Johan Nilsson, Real-Time Control Systems with Delays, 1998
Teaching
I have taught the following courses
PhD courses- Linear Systems 2014
- Game Theory 2014
- Linear Systems 2013
- Convex Optimization 2012, 2013
- Linear Systems II, 2010
- Robust Control 2007
- Control in Mobile Communication, 2004
- Game Theory 1999, 2000, 2006
- Tools in Control 1999
- Hybrid Control 1996
- Hilbert Space Theory 1995
- Non-Smooth Analysis 1995
- Stochastic Systems 1995
- Linear Quadratic Control 1994
- Nonlinear Control Theory 1993
- Control Synthesis 1991, 1995, 2000, 2010
- H-infinity Control 1990
- Linear Systems 1989, 2009, 2007, 2009, 2010, 2013
Basic Education
- Predictive Control 2012
- Automatic Control Basic Course 2011, 2013
- Market-driven Systems (minor part of)
- Systems Engineering 2001
- Nonlinear Control and Servo Systems 1998, 1999
As a student I was also teaching assistant in different courses in Control, Mathematics and Telecommunication.
Publications
Bibliometry (Google Scholar) is available here
My Erdös number is 3 (BoB -> Jaak Peetre -> Svante Jansson -> Erdös)
The following list is automatically generated and is unfortunately not complete
104 publications found.
Work in the Mobile Phone Industry
During the years 2001-2010 I worked at Ericsson as an Expert in Mobile System Design and Optimization. I worked with debugging and optimization of mobile phone performance in the 3G (WCDMA) system and later with the early design of the 4G (LTE) system.
Patents
Each line correponds to a patent family with at least one granted patent. The total number of granted patents is probably 2-3 times higher. Most listed patents have 1-3 coinventors.
- Sampling device and method in digital receivers, EP 1480369B1, 23-Aug 2006
- Method and apparatus for improved cell detection US 7110376, 19-Sep-06
- WIRELESS TRANSCEIVERS, METHODS, AND COMPUTER PROGRAM PRODUCTS FOR RESTRICTING TRANSMISSION POWER BASED ON SIGNAL- TO-INTERFERENCE RATIOS US7149538, 12-Dec-06
- Electronic devices having automatic frequency control systems and methods US 7177602, 13-Feb-07
- Method and apparatus for power control in a mobile radio system US 7283791, 16-Oct-07
- Methods, receivers, and computer program products for determining transmission power control commands using biased interpretation US 7184791, 27-Feb-07
- METHOD AND SYSTEM FOR DETERMINING UPLINK/DOWNLINK PATH-LOSS DIFFERENCE EP 2004819603, US7302276, 27-Nov-07
- METHOD FOR DETERMINING A GAIN OFFSET BETWEEN TRANSMISSION CHANNELS US 7346126, 18-Mar-08
- Channel Estimation by Adaptive Interpolation US 7433433, 7-Oct-08
- Synchronization Detection Methods and Apparatus US 7437175, 14-Oct-08
- Calculation of soft decision values using reliability information of the amplitude US 7583760, 1-Sep-09
- Simplified Generalized Rake Receiver Method and Apparatus US 7680176, 16-Mar-10
- Method and apparatus for communication channel estimation US 7680218, 16-Mar-10
- METHOD AND APPARATUS FOR FAST FFT PROCESSING OF PAGING INFORMATION EP20060841155, US7684312, 23-Mar-10
- METHOD OF AND APPARATUS FOR ADAPTIVE FREQUENCY ERROR ESTIMATION EP20070822391, 11-Aug-10
- Method and apparatus for delay spread estimation, EP2071784
- Determining a detection signal in a spread spectrum communications systems, US 7949036, 24-Mar-11
- TIME-ERROR AND FREQUENCY-ERROR CORRECTION IN A MULTI-CARRIER WIRELESS COMMUNICATIONS SYSTEM, US7991378, 2-Aug-2011
- Method and device for power control in a wireless communication system, US 8036694, 11-Oct-11
- Alleviating Mobile Device Overload Conditions in a Mobile Communication System, US8086229, 27-Dec-2011
- METHOD AND APPARATUS FOR FREQUENCY CONTROL IN WIRELESS COMMUNICATIONS, US8103219, 24-Jan-12
- Method and apparatus for channel quality derivation, US8385222B2, 26-Feb-2013
- Methods and Systems for adaptable receiver parameters, US8401128B2, 19-Mar-2013
- Communication Device and Method, US8798213 B2, 5-Aug-2014
- Method and apparatus for interference suppression using a reduced-complexity joint detection, US8744026 B2, 03-06-2014
Talks
Personal Information