

Robotics
Robotics offer both theoretical and practical challenges. Our main research are in motion and compliance control, control system architectures and different sensor fusion problems.
Robotics Research
Robotics offers both theoretical and practical challenges with multi-disciplinary topics. We collaborate both with national and international robotics colleagues regarding various different aspects of robotics and we also have a close cooperation with industrial partners. Our main research are in motion and compliance control, control system architectures and different sensor fusion problems with application mainly to industrial manipulators. We use mainly modified and extended ABB robot control systems as experimental platforms.
 |
 |
|
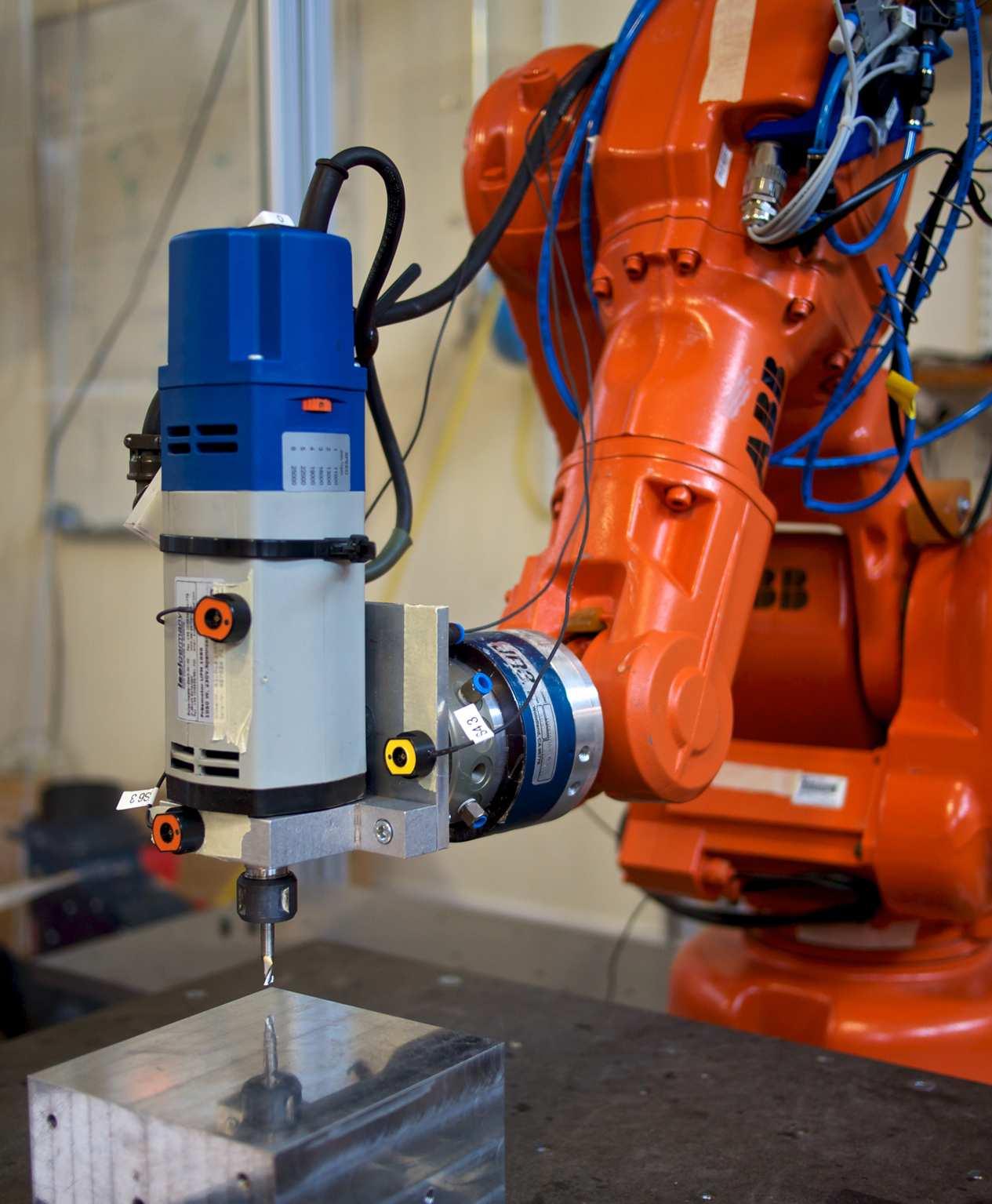
The laboratory for robotics and real-time systems is centered around industrial manipulators with open control system architectures. In the lab we have several generations of robots from elderly ABB S4Cplus to the more modern ABB IRB140 (IRC5), Gantry-Tau robot (IRC5), ABB IRB120 (IRC5) and the latest dual-arm concept robot Yumi/Frida (ABB IRC5) and new both commercial and experimental robot control systems. Hardware interfaces have been developed to create an open system suitable for control experiments (Orca/Orcinus). The computer hardware is either PCI-based with both microprocessors and signal processors integrated into an embedded system for hard realtime control in one of the labs and integrated with an additional PCI-based G4 PowerPC for the new Open Control system based on S4CPlus and the newly developed networked architecture running on Linux/Xenomai-platforms.
The systems are connected to a network with workstations, which are used for program development and control design. A purpose of the current project is to show how to organize open robot control systems and to verify these ideas by means of experiments.
One goal is to permit efficient specification and generation of fast robot motions along a geometric path which requires coordinated adjustment of the individual joint motions. Another aspect of robot motion control is how to to integrate simultaneous control of force and position according to ideas of impedance control in which stability is an important theoretical issue. A major topic in this project is to integrate aspects of control, sensor fusion and application demands using robot vision and force sensing. Another project is on the structure and programming of control systems for industrial robots. The problem addressed is how the software architecture and the realtime structure of a robot control system should be designed to allow easy and flexible incorporation of additional sensors and new control algorithms.
A software layer between a supervisory sequence control layer and the basic control level has been proposed. Case studies and prototype experiments show promising results and further implementation is going on. The use of force control in manufacturing and assembly operations has been a long standing theme in the research and industrial colloboration. New sensor interfaces with modification of hardware and realtime software architectures have been developed to accommodate the use of force control algorithms based on workspace sensing. The research in this area has been awarded with, e.g., the EURON Technology Transfer award and ICRA Best Automation paper.
 |
 |
|
Several research interests are represented in Robotics Lab:
- Open Control Software Architectures
- Exteroceptive Robots
- Force Control
- Robot Vision
- Sensor Fusion
- Adaptive and Iterative Learning Control
- Task-level Programming
- Productive Robotics & Work-space Sensing
Productive Robotics, Robotics Lab
Robot control systems and other manufacturing equipment are traditionally closed. This circumstance has hampered system integration of manipulators, sensors and other equipment. As a result, such system integration has often been made at an unsuitably high hierarchical level.
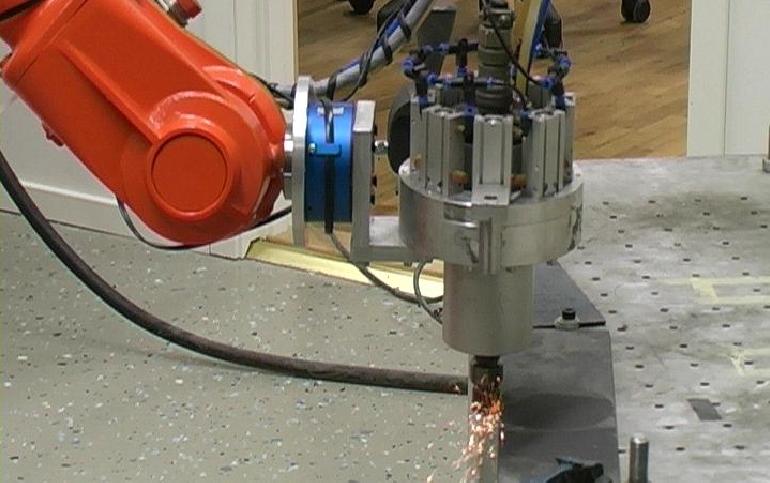
The purpose of past and present projects is to show how to organize open robot control systems and to verify these ideas by means of experimental verification. As a part of this research, we have developed several experimental open robot control systems. The systems are built around industrially available robots that have been reconfigured for experimental purposes.
The developed specific robot interfaces and the integration of the robots into a complete system forms a unique environment for testing and development of algorithms for improvement of performance, sensor integration, programming automation and autonomous operation.
Ongoing projects:
- SARAFun - Smart Assembly Robots with Advanced Functionalities
Recently finished projects:
- FlexiFab - Flexible fabrication of leightweight aluminum structures (EU FP7 under grant agreement no. FP7-SME-2014-2-606156-FLEXIFAB).ENGROSS - Enabling Growing Software Systems
- SMErobotics - The European Robotics Initiative for Strengthening the Competitiveness of SMEs in Manufacturing by integrating aspects of cognitive systems (funding from European Union Seventh Framework Programme (FP7/2007-2013) under grant agreement n° 287787.)
- PRACE - The Productive Robot ApprentiCE (EU FP7)
- ROSETTA - RObot control for Skilled ExecuTion of Tasks in natural interaction with humans; based on Autonomy, cumulative knowledge and learning
- ProFlexA - Productive Flexible Automation
- COMET - Plug-and-produce COmponents and METhods for adaptive control of industrial robots enabling cost effective, high precision manufacturing in factories of the future (EU-FP7)
- SMErobot —The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing (Integrated project funded under the European Union’s Sixth Framework Programme (FP6))
- SSF ProVikingFlexAA
- Flexcon
- Autofett