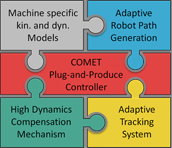
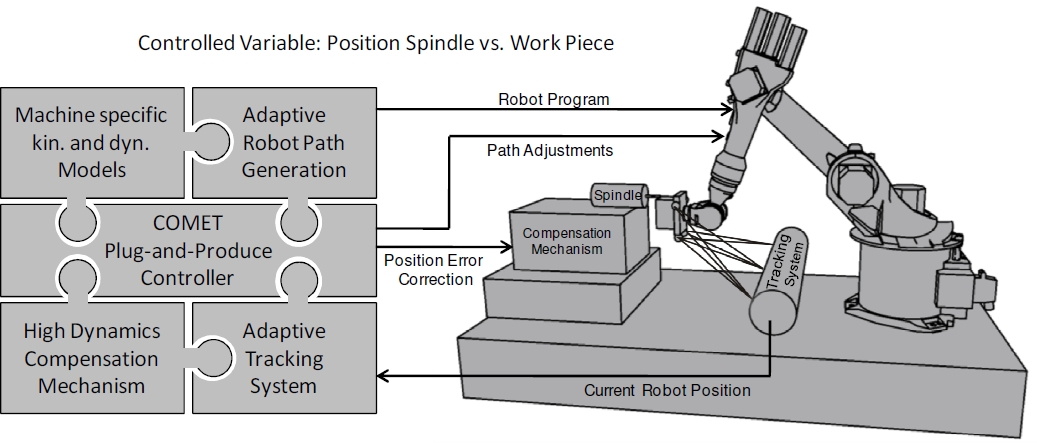
The COMET project aims at creating solutions enabling the use of industrial robots for high-end machining tasks in industry. The goal of the project is to develop a Plug-and-Produce platform, which will fulfill the needs from the manufacturing industry for cost effective, flexible and reliable manufacturing solutions. The components of the project are described by the figure:
The four pieces of the puzzle in the figure above define the different parts of the project, which also constitute the technical work packages:
Björn Olofsson: Topics in Machining with Industrial Robot Manipulators and Optimal Motion Control. PhD Thesis ISRN LUTFD2/TFRT--1108--SE, Department of Automatic Control, Lund University, Sweden, September 2015.
Ulrich Schneider, Björn Olofsson, Olof Sömmo, Manuel Drust, Anders Robertsson, Martin Hägele, Rolf Johansson: "Integrated approach to robotic machining with macro/micro-actuation". Robotics and Computer-Integrated Manufacturing, 30:6, pp. 636–647,2014.
Björn Olofsson: "Topics in Machining with Industrial Robots and Optimal Control of Vehicles". Licentiate Thesis ISRN LUTFD2/TFRT--3259--SE, Department of Automatic Control, Lund University, Sweden, 2013.
Olof Sömmo, Björn Olofsson, Anders Robertsson, Rolf Johansson: "Increasing Time-Efficiency and Accuracy of Robotic Machining Processes Using Model-Based Adaptive Force Control". In 10th International IFAC Symposium on Robot Control, Dubrovnik, Croatia, September 2012.
Björn Olofsson, Olof Sömmo, Ulrich Schneider, Marc Barho, Anders Robertsson, Rolf Johansson: "Increasing the Accuracy for a Piezo-Actuated Micro Manipulator for Industrial Robots using Model-Based Nonlinear Control". In 10th International IFAC Symposium on Robot Control, Dubrovnik, Croatia, September 2012.
Olof Sömmo, Björn Olofsson, Ulrich Schneider, Anders Robertsson, Rolf Johansson: "Increasing the Milling Accuracy for Industrial Robots Using a Piezo-Actuated High-Dynamic Micro Manipulator". In 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kaohsiung, Taiwan, July 2012.
Björn Olofsson, Olof Sömmo, Ulrich Schneider, Anders Robertsson, Arnold Puzik, Rolf Johansson: "Modeling and Control of a Piezo-Actuated High-Dynamic Compensation Mechanism for Industrial Robots". In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'2011), San Francisco, CA, USA, September 2011.